
https://github.com/ParkGyeongTae/dqn-atari-breakout/tree/main/0_cartpole-v0-example
GitHub - ParkGyeongTae/dqn-atari-breakout
Contribute to ParkGyeongTae/dqn-atari-breakout development by creating an account on GitHub.
github.com
conda create -n py37 python=3.7
conda activate py37
pip install gym==0.23.1
pip install pygame==2.1.2

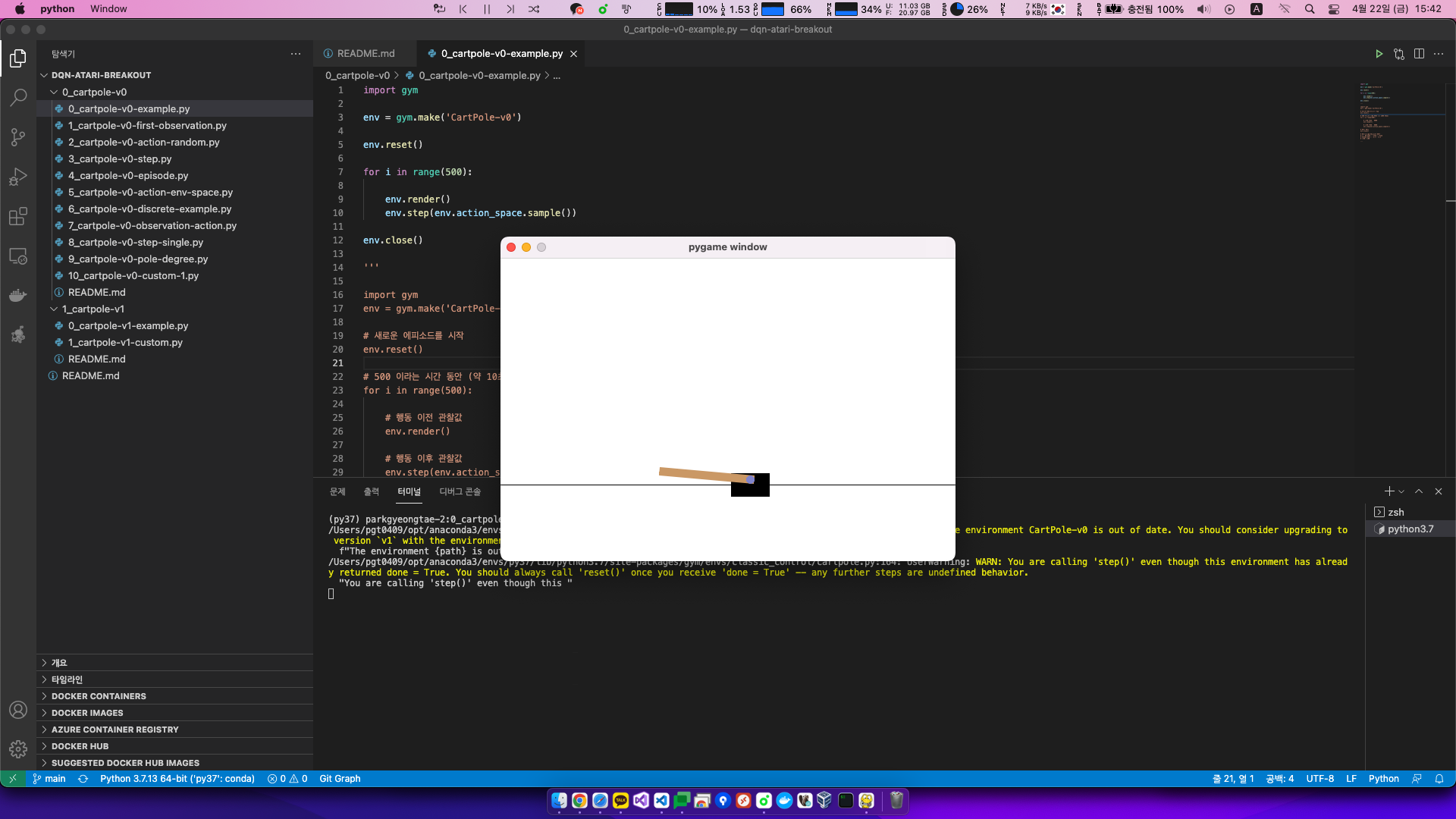
0_cartpole-v0-example.py
import gym
env = gym.make('CartPole-v0')
env.reset()
for i in range(500):
env.render()
env.step(env.action_space.sample())
env.close()
python 0_cartpole-v0-example.py
'''
import gym
env = gym.make('CartPole-v0')
# 새로운 에피소드를 시작
env.reset()
# 500 이라는 시간 동안 (약 10초 정도)
for i in range(500):
# 행동 이전 관찰값
env.render()
# 행동 이후 관찰값
env.step(env.action_space.sample())
# 환경 종료
env.close()
# 에피소드가 종료되는 조건
# 막대기 각도 : -12도 ~ +12도
# 카트의 위치 : -2.4 ~ +2.4
# 시간 > 200
'''
'Programming Language > Python' 카테고리의 다른 글
| [Python] 강화학습, CartPole-v1 행동(action) 알아보기 (0) | 2022.04.22 |
|---|---|
| [Python] 강화학습 CartPole-v0 첫 관찰값 출력하는 방법 (0) | 2022.04.22 |
| [Python] No module named 'pyglet' (0) | 2022.04.22 |
| [Python] 아나콘다로 python 3.6, python 3.7 가상환경 만들고 삭제하는 방법 (0) | 2022.04.22 |
| [Conda] cmd에서 (base) 없애는 방법 (0) | 2022.04.14 |